About Course
Course Content
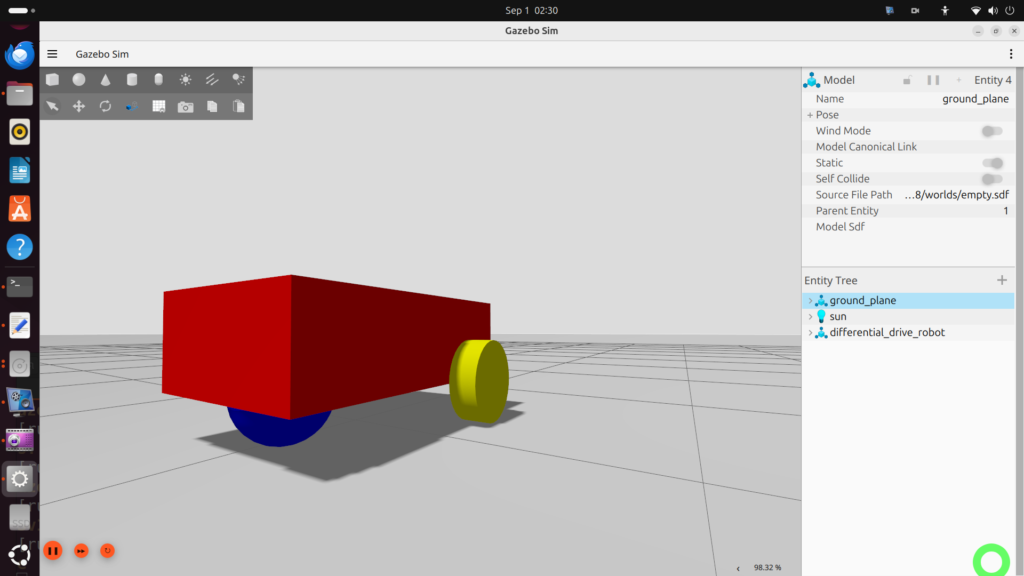
Model and simulate a differential drive mobile robot in ROS2 Jazzy Jalisco and Gazebo from Scratch
-
Introduction Lesson
06:58 -
Create an URDF and Xacro Files Defining Robot Geometry
39:22 -
Create Gazebo, Parameter, Launch, and Package Files and Run ROS2 and Gazebo Simulation
01:02:54
Student Ratings & Reviews

No Review Yet